「フィンガービジョン」でロボットのための人工知能研究を加速させる – 東北大・山口明彦助教
【academist挑戦中】「フィンガービジョン」でロボット研究を加速する!
触覚と視覚が融合したセンサ「フィンガービジョン」の開発を進めている東北大学大学院情報科学研究科の山口明彦助教。ロボットの手のひらに目がついているような状態の実現を目指し、クラウドファンディングに挑戦している。フィンガービジョンを搭載したロボットでは、いったい何ができるのだろうか。また、どのような未来を見据えて山口助教は研究を進めているのだろう。ロボットのための人工知能「ロボットラーニング」がキーワードだ。
――今回のクラウドファンディングプロジェクトでは、「フィンガービジョン」改良のために資金を募られていますね。フィンガービジョンの概要を教えてください。
フィンガービジョンとは、私が開発を進めている触覚センサです。人間の手は触覚を持っていますが、多くのロボットは持っていません。触覚のないロボットで柔らかいものや壊れやすいものを操作することは非常に困難です。そこでロボットのための安価で高性能な触覚センサを作ろうと、このプロジェクトを発足させました。
――触覚センサには、ほかにもいろいろなタイプのものがあると思います。フィンガービジョンの特徴を教えてください。
安いものでは、金属の変形によって電気抵抗が変化するひずみゲージを利用した触覚センサがありますが、あまり性能が高いとは言えません。一方、圧力分布や振動など、ヒトの指先の皮膚感覚に近い情報を検知できる指型の触覚センサもありますが、非常に高価です。これら触覚センサの課題を解決するため、フィンガービジョンでは、カメラを利用します。これにより、広範囲で圧力やその分布、滑りの情報を捉えることができるうえ、材料費は5000円程度ですみます。また皮膚の部分が透明であるため、皮膚の外側を見ることもできます。すなわち「触覚」だけでなく「視覚」を持つというのも特徴です。
――フィンガービジョンでは、どういった仕組みで皮膚のような感覚の情報を得ているのですか。
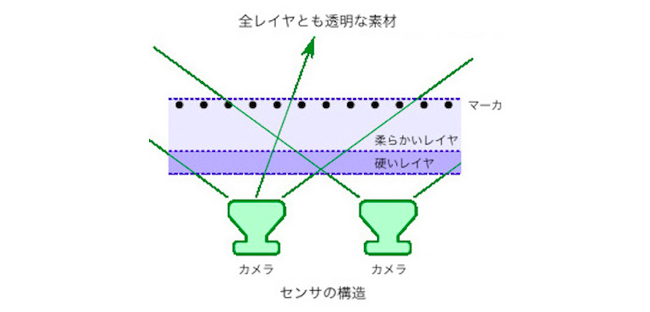
フィンガービジョンの特徴である透明な皮膚は、アクリルでできた硬いレイヤと、シリコンからなる柔らかいレイヤで構成されています。この柔らかい層のマーカーの変形をカメラで読み取ることで外力を推定します。さらに、内部のカメラによって撮影した画像を解析することで、操作している物体の滑り・変形といった情報も捉えられます。また、カメラを使っているということは、人間の皮膚と異なり、接触していなくても近接物体の情報を取得できるということです。硬いレイヤは、外力がカメラに到達するのを防いでいます。
――今回のクラウドファンディングプロジェクトのテーマは「フィンガービジョンでロボット研究を加速する!」です。フィンガービジョンを使うと、どのようなロボットが実現できそうですか。
たとえば、野菜や果物のような壊れやすかったりつぶれやすい物体をロボットで操作できるようになります。ロボットは現在、自動車や電子機器の工場など、工業分野では日常的に利用されている一方で、食品業界ではまだあまり普及しているとは言えません。食品検査などの分野にフィンガービジョンのような触覚センサを持つロボットが導入されれば、おなじ品種の果物や野菜でも、潰さないで選別するということができるかもしれません。
また、ホームケアロボットへの応用も考えられます。ホームケアロボットのように、人間とインタラクションしようとするロボットを作る際には、人間を傷つけてはいけません。フィンガービジョンを使えば、とても”ジェントル”なロボットを作ることができると考えています。
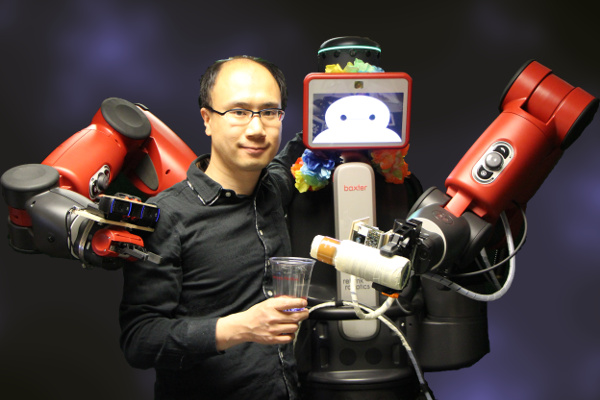
――フィンガービジョンは、カーネギーメロン大学のChris Atkeson教授と共に進められている「Whole-body Vision」というプロジェクトの一環として研究を進められていますよね。ロボットの全身にフィンガービジョンを貼り付けたようなイメージになると思うのですが、そのようなロボットではいったい何ができるのでしょうか。
フィンガービジョンを全身に貼り付けることで、ロボットが知覚できない場所がなくなるんです。たとえば、頭にしかカメラが付いていないロボットでは、関節の脇に人間の手があり、挟み込みそうになってしまっても、検知することができません。その部分にフィンガービジョンのようなセンサがあると、ぶつかる前に画像で捉え、次のアクションにつなげることができる。つまり、超安全なロボットができると見込んでいます。
――クラウドファンディングのページでは共同研究者も募られていますね。
たとえば、無色透明の柔軟素材を開発していただける企業との共同研究が考えられます。フィンガービジョンの皮膚は、硬すぎると感度が悪くなりますが、柔らかすぎると扱いが難しくなります。透明度があり、なおかつ適度な柔らかさを持つ材料はなかなかありません。
またフィンガービジョンではカメラを用いるので、カメラ周りの電子回路の設計を担当していただける企業があると、すごく助かります。コンピュータビジョンの研究者や、野菜や果物などの食品検査に関わる研究者の方などともコラボレーションが考えられます。
――フィンガービジョンの今後の課題を教えてください。
今いちばんの課題は、皮膚に対して垂直方向の感度を向上させることです。皮膚上のマーカーは、横方向には大きく動きますが、縦方向への動きが小さいため、動きの検出が難しいためです。皮膚の形状やマーカーを工夫することによって改善していく必要があると思います。また、カメラを用いるということは、周囲が暗いと使えないということです。フィンガービジョンにLEDを搭載するなどして解決する必要があると考えています。
――山口先生は10年以上、ロボットのための人工知能であるロボットラーニングの研究に携わられていたそうですね。触覚センサに興味を持ったきっかけはなんだったのでしょうか。
ロボットにおいていちばん難しいといえる問題は、バナナの皮を剥いたり、折り紙を折ったりなど人間が日常でやっているような物体操作です。人間にとってはすごく簡単なことなのに、ロボットにとっては非常に難しい。そこに人工知能技術を応用できないかという研究を進めていた際に、高性能な触覚センサがないことが不利益になっていることに気づきました。
人間でも、分厚い手袋をつけると物体操作が難しいですよね。それと同じことがロボットにも起きていることがわかったんです。触れている物体が滑っていることにロボット自身が気付くことができないんです。そこで、新しい触覚センサを開発しようと思い立ちました。今後は、フィンガービジョンの研究を進めていくことで、ロボットの物体操作のための人工知能を開発していこうと考えています。
――「人工知能」がキーワードになるんですね。
私が研究を始めた当時は、人工知能というと、テキスト処理などの機械学習技術にシフトしつつあった時代で、コンピュータの中で閉じた世界を中心に考えられていたんです。しかし私は、それに対して少し違和感を感じていました。現実の世界では、人はインタラクションしながらコミュニケーションをとっていきます。この現実世界で起こっていることを、身体を持ったロボットにやらせたいと思っていたからです。
将棋を行う人工知能は、将棋に特化したプログラムを書いたにすぎません。人間はなぜ人間らしくいられるのでしょうか? 身体を持っているということが、その疑問に対する大きなファクターになるのではないか。私はそう考えてロボットラーニングの研究を進めています。
――最後に、今後の研究のビジョンを教えてください。
私の研究人生が終わるまでには、人間と同等の、またはそれ以上の能力を持つ人工知能を作りたいです。もちろん、そこには身体も含まれていて、触覚センサのようなものも搭載されていることでしょう。それによって、人間が行うにはつらい作業をロボットが代わりにやってくれるというような世界観を作っていきたいですね。
山口明彦助教プロフィール:2006年京大工学部電気電子工学科卒。2008年奈良先端大情報科学研究科博士前期課程修了。2011年同博士後期課程修了。博士(工学)。奈良先端科学技術大学院大学情報科学研究科特任助教、カーネギーメロン大学ロボット研究所博士研究員、ブレーメン大学人工知能研究所客員研究員を経て、2017年9月より東北大学情報科学研究科助教。ロボットラーニング、ロボットマニピュレーションの研究に従事。
【academist挑戦中】「フィンガービジョン」でロボット研究を加速する!
この記事を書いた人

- フリーランスライター/編集者。お茶の水女子大学大学院博士前期課程修了。修士(理学)。出版社でIT関連の書籍編集に携わった後、Webニュース媒体の編集記者として取材・執筆・編集業務に従事。2017年に独立。現在は、テクノロジー、ビジネス分野を中心に取材・執筆活動を行う。アカデミストでは、academist/academist Journalの運営や広報業務等をサポート。学生時代の専門は、計算化学、量子化学。 https://www.suto-hitomi.com/