加熱・冷却すると歩いたり転がったりする「ロボット結晶」を開発! – ソフトロボットへの応用に期待
ある温度になると曲がる結晶
結晶とは、原子や分子が周期的に規則正しく並んだ物質です。私たちの身のまわりには多くの結晶があります。たとえば、砂糖や食塩、氷やダイヤモンドなども結晶です。これらの結晶のイメージからすると、肌感としては「硬い」という印象を受けます。しかし、ここ10年ほど、外部刺激によって変形する結晶が数多く報告されてきました。たとえば、光によって反応する分子でできた結晶は、光を当てると曲がったりねじれたりします。これは、光反応による分子の構造変化を利用しています。また、ピンセットなどで外部から力をかけたときに、壊れずに大きく変形する結晶もあります。
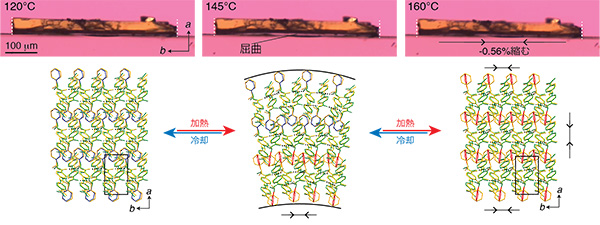
今回紹介する結晶は、熱を外部エネルギーとしています。室温から加熱していくと、145℃で結晶構造が変化します。この現象を構造相転移といいます。145℃までの結晶構造を低温相、それより高温側の結晶構造を高温相と呼ぶことにすると、145℃付近では低温相と高温相が共存した状態になります。これは、ホットプレートで加熱すると結晶の下側から高温相に変化するためです。このとき、低温相よりも高温相の方が長さ(b軸方向)が短いので、結晶が曲がります。実は、この結晶は、以前academist Journalに寄稿した「光を当てるとねじれ曲がる結晶 – 分子の反応を材料の動きへ」と同じキラルアゾベンゼン結晶です。以前の研究では光反応を使っていましたが、その研究過程で熱によって構造相転移も起こることが偶然わかりました。この熱的な構造相転移は、光反応による変化とはまったく異なる構造変化です。
結晶自体が尺取り虫のように歩く
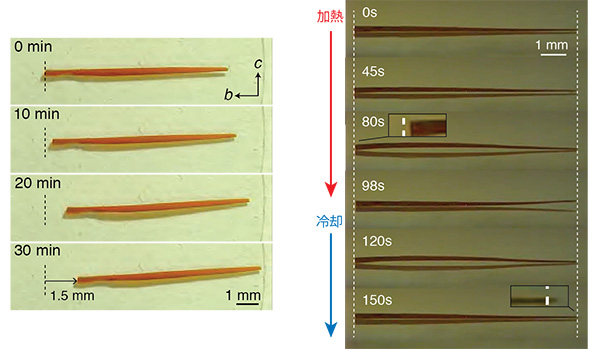
では、145℃前後で加熱・冷却を繰り返すとどのように動くのでしょうか。長さ約1cmの結晶を観察したところ、結晶が屈曲を繰り返し、尺取り虫のように徐々に歩いていくことがわかりました。30分間で1.5mmというゆっくりとした移動です。
この結晶を真横から見ると、厚みに勾配があることがわかります。左端は厚く、右端は薄くなっています。この厚みに勾配のある結晶を加熱すると、145℃付近で結晶が曲がるとともに、左端(厚い側)が少し右に移動しました。結晶全体が高温相になると屈曲はなくなり、元の長さよりわずかに短くなった状態になります。次に、冷却していくと、再び結晶が曲がり、元のまっすぐな形に戻るときに右端(薄い側)が移動しました。この時点で結晶全体は低温相なので、長さは元に戻っています。長さの伸び縮みを利用して、まさに結晶自体が「尺」を取って歩いていると言えます。
高速で転がっていく
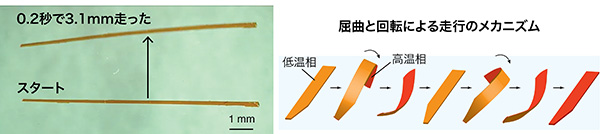
次に、より薄く細長い結晶でも観察しました。その結果、加熱・冷却を繰り返す必要なく、1回の加熱または冷却によって、結晶が転がって速く動いていくことがわかりました。この場合、0.2秒で3.1mmも移動しました(秒速15mm)。これは尺取り虫歩行(秒速0.0008mm)の2万倍の速さなので、「歩く」に対比させて「走る」と表現できます。
なぜ転がるかというと、結晶が屈曲したときにバランスを保てず横に倒れるからです。倒れてひっくり返る間に、高温相は空気に冷やされて低温相に戻ります。したがって、一度ひっくり返った後も再び屈曲します。最初の回転の勢いも相まって一方向に転がり続け、低温相に戻れないほど高温になると動きが止まる、と説明できます。冷却時も同様の現象が起きます。以上のように、結晶外形の非対称性を利用して、歩く・走るというように結晶自体を移動させることに成功しました。
今後の展開
これまでの研究により、ひとつの結晶が光で曲がり、さらに熱でも曲がり移動することを見出しました。次の展開は、光と熱を組み合わせてより多様な動きを創出することです。光反応と熱的な構造相転移は異なる現象なので、光と熱を組み合わせることで、いくつかの動きのパターンを生み出すことができます。そのためには、145℃という温度での構造相転移は実験的にも実用的にも扱いづらいので、より室温に近い温度で相転移する結晶を見つける必要があります。
より大きな視野での展開は、ソフトロボットに応用することです。第4次産業革命と呼ばれIT化の進む現在の社会では、人間とロボットがふれあう機会が多くなっています。金属でできたロボットは硬くて重いので、軽くて柔らかい「ソフトロボット」への期待が高まっています。軽くて柔らかいという性質は有機材料の得意分野なので、有機結晶もひとつの大きな選択肢になります。特に、外部刺激によって変形できる結晶は、それ自体を小さなマイクロロボットとして利用できるようになるかもしれませんし、大きなソフトロボットの筋肉などにも適用することができると考えられます。新しい材料を開発してソフトロボットを作っていくことで、人間とロボットが融和する社会を実現できると考えています。
参考文献
T. Taniguchi, H. Sugiyama, H. Uekusa, M. Shiro, T. Asahi, H. Koshima, “Walking and rolling of crystals induced thermally by phase transition”, Nat. Commun. 9, 538 (2018).
DOI: 10.1038/s41467-017-02549-2
この記事を書いた人

- 早稲田大学先進理工学研究科先進理工学専攻 一貫制博士課程4年。2017年度より日本学術振興会特別研究員(DC2)。早稲田大学リーディング理工学博士プログラムに所属し、「エナジー・ネクスト」をテーマとして、外部刺激で動く新しい材料の開発を目指して研究しています。






