特定の信号で自発的に「群れ」をつくる分子ロボットの開発に成功!
人工知能(AI)が急速に発展するなか、AIがヒトの知能を超える「技術的特異点(シンギュラリティ)」が話題に上るようになりました。一方、2016年度ノーベル化学賞の受賞テーマになるなど「ナノマシン(分子機械)」も注目を集めています。人知を超えたAIがナノマシンを制御することで、人間文明に計り知れない変化をもたらすと予測されています。
AIは情報科学分野の研究対象ですが、ナノマシンは化学や工学などの応用科学分野に属します。このような背景から、従来のロボット工学の手法に倣って、分子サイズの部品から、分子ロボットを組み上げる新しい学術分野「分子ロボティクス」が創成されています。私たちは、ロボット工学で最も注目される研究対象のひとつである「群ロボット」を分子システム(分子ロボット)として開発することに、世界で初めて成功しました。
群ロボットとは?
ロボットのひとつに、鳥や魚のような群を再現する「群ロボット」 があります。群ロボットは、全体を統括するリーダーがいなくても、自発的に環境に合わせて柔軟に集合形態を変えるほか、仕事を効率よく分担したり、一部の不具合を補い合ったりなど、単体のロボットでは不可能なこともできるのが特徴です。医療現場や災害現場などでの応用利用が期待されており、世界的にも競争の激しい分野となっています。しかしミクロサイズのロボットの開発は難易度が高く、これまでに成功例はありませんでした。本研究では、機械装置でつくられる従来のロボットではなく、分子部品を組み立てることで、群として働く世界最小のロボット(分子ロボット)を作りました。
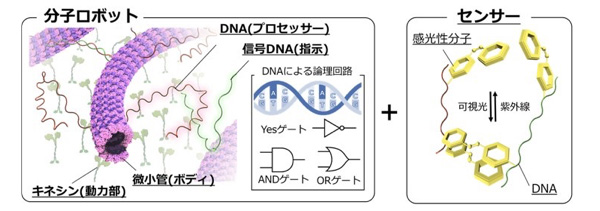
ロボットを制作するには、1)駆動系、2)知能・制御系、3)センサー)の3要素が必要になります。今回開発した分子ロボットは、私たちの細胞のなかで物質輸送に使われているモータータンパク質系と遺伝情報を記録する核酸(DNA)を組み合わせて合成されています。ロボットの3要素にあてはめると、前者が駆動系、後者が知能・制御系に相当します。さらに光を感知する色素(アゾベンゼン)を、センサーとして核酸に人工的に組み込みました。これにより、化学的信号だけなく光などの物理的信号を感知し、自発的に群れたり別れたりする分子ロボットが出来上がりました。将来的には、体の中などで働くナノマシンとしての応用が期待されます。
分子ロボットの組み立て
本研究では、「モータータンパク質」「核酸」「色素」を組み合わせることで、情報処理しながら群を自発的に形成する分子ロボットを、工学的な設計手法に基づいて組み立てました。
今回使用したモータータンパク質は、従来のロボットの駆動系に相当するものです。細胞のなかで輸送網として使われている微小管―キネシン系です。化学的なエネルギーを力学的な仕事へと変換するシステムで、優れたエネルギー変換効率と高い比出力特性(一般的な電磁モーターの20倍)を有しています。
核酸は、化学的に合成した一本鎖DNAを使用しました。DNAの分子認識能を利用することで、デジタルデータを記録したり、DNAコンピューターを構築することができます。このDNAコンピューターが分子ロボットの知能・制御系に相当します。DNAの配列を特別に設計することで、相手を識別しながら群れをつくるかどうかを自ら判断することができるようになります。
さらに、色素には感光性分子(アゾベンゼン)を採用しました。紫外線や可視光に反応し、構造が変化する性質を利用して、DNAコンピューターの機能をON/OFFスイッチすることができます。つまり、これがセンサーに該当します。
このようにして合成した人工分子が分子ロボットそのものであり、群れを構成する鳥や魚などと同様に、基本単位になります。大きさは直径25ナノメートル、全長は5マイクロメートル(髪の毛の20分の1)程度です。
特定の信号を感知し自発的に「群れ」を形成
まず緑と赤の2種類で色分け(蛍光色素)した分子ロボットを500万体用意しました。これらの分子ロボットをキネシンとともに自由に走らせているところに、集合させる命令を書き込んだDNA鎖を加えると、命令通りに集まり始め、最終的にはほぼすべての分子ロボットが群を形成しました。

さらに解散させる命令を書き込んだDNA鎖を加えることで、その群を完全に解消させることにも成功しました。より複雑な命令も可能で、適切なプログラムを与えることにより、これらの分子ロボットに理論的な演算をさせることもできました。センサーとして、光を当てると性質が変わるような分子をさらに組み込むことで、これらの命令は光信号で与えることもできました。この場合、可視光(λ = 480 nm)で集合し、紫外光(λ = 365 nm)の照射で群が解消します。

さらに、微小管の剛性を調節することで、群の運動形態を直進や回転などのあいだで自在に制御することにも成功しました。
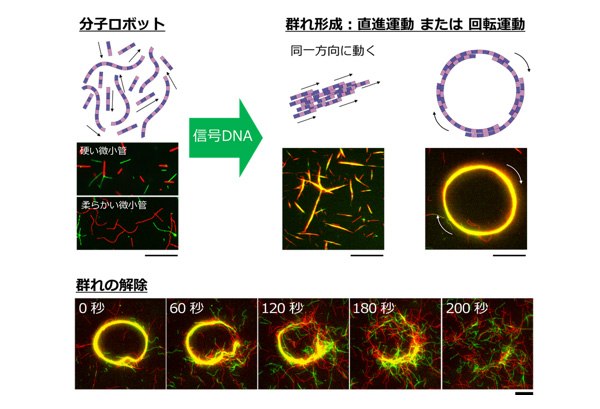
(下)別の信号DNAを入力することによる群れの解除。スケールバー:20マイクロメートル
分子ロボットが創る未来
群ロボット研究において、個体の「サイズダウン」と個体数の「ボリュームアップ」が課題となっていました。著者らは分子部品からなる分子ロボット開発することでブレークスルーし、サイズはセンチメートルからナノメートルまで、個体数は千個体から数百万個体までのスケールアップに成功しました。
数年後にはマイクロサイズの人工筋肉や画像素子(化学的・物理的な刺激に応じて分子ロボットの群れが変形することで、自在に画像を描き出すシステム)、遺伝子診断キット(感知した遺伝情報を、分子ロボットが画像を描き出し視覚的に表示するシステム)、マイクロリアクタ(分子ロボットによるナノ部品の組み上げ工程や化学プラントなどのシステム)などの実現を目指します。数十年後には、医療現場や災害現場で、検査や情報収集に活用されるナノマシンなどの開発につなげたいと思っています。
参考文献
-
- Jakia Jannat Keya, Ryuhei Suzuki, Arif Md. Rashedul Kabir, Daisuke Inoue, Hiroyuki Asanuma, Kazuki Sada, Henry Hess, *Akinori Kuzuya, *Akira Kakugo, “DNA-assisted swarm control in a biomolecularmotor system” Nature Communications, 9: 453 (2018)
- Daisuke Inoue, Takahiro Nitta, Arif Md. Rashedul Kabir, Kazuki Sada, Jian Ping Gong, Akihiko Konagaya, *Akira Kakugo “Sensing Surface Mechanical Deformation Using Active Probes Driven by Motor Proteins” Nature communications, 7: 12557 (2016)
- Hiroyuki Asanuma, Xingguo Liang, Hidenori Nishioka, Daijiro Matsunaga, Mingzhe Liu, Makoto Komiyama; Nature Protocol. 2007;2(1):203-12.
この記事を書いた人
-
ケア ジャキア ジャンナット(写真左)
北海道大学大学院総合化学院 博士研究員。博士(理学)。2017年北海道大学大学院総合化学院卒業。専門は分子ロボティクス。自己組織化(集団運動)、生物物理、DNAナノテクノロジーに精通。
葛谷明紀(写真中央)
関西大学 化学生命工学部 准教授。2002年東京大学大学院工学系研究科博士課程修了。博士(工学)。日本学術振興会特別研究員(PD)、ニューヨーク大学客員研究員東京大学大学院工学系研究科助教などを経て、2011年4月より、関西大学化学生命工学部准教授。2012年~2016年JSTさきがけ研究員を兼任。2016年(公財)野口研究所第2回野口遵賞など受賞。DNAを賢い材料として活用し、様々な分子デバイスをつくる研究を展開。
角五彰(写真右)
北海道大学大学院理学研究院 准教授。博士(理学)。2004年 北海道大学大学院理学研究科 助手を経て2011年から現職。2008年~2012年 JST さきがけ研究者、2018年~2019年コロンビア大学生命医工学部 客員研究員を兼任。2012年には科学技術分野文部科学大臣表彰 若手研究者賞、文部科学省、2016年には高分子学会 学術賞などを受賞。専門は分子ロボティクス、アクティブマター、ナノバイオサイエンス。
この投稿者の最近の記事
 研究成果2018年3月30日特定の信号で自発的に「群れ」をつくる分子ロボットの開発に成功!
研究成果2018年3月30日特定の信号で自発的に「群れ」をつくる分子ロボットの開発に成功!


