素敵な出会いを応援します – オスとメスが効率よく互いをさがす動き方とは?
犬も歩けば棒に当たるとあるように、生物にとって「動く」ことは、他の生物と出会うための重要なプロセスであることがわかります。では、出会いたい相手がどこにいるのかわからないときに、生物はどのように動けば、効率よく目標の相手を探すことができるでしょうか。これは、ランダム探索問題と呼ばれ、人を含めた動物の探索行動だけでなく、分子運動や工学などの応用にも直結する幅広い問題です。
動きのパターンと探索効率
この問題に対するひとつの答えとして、Lévy walkという移動パターンが研究されてきました。これは頻繁に生じる短い直線移動と、稀に生じる長い直線移動からなる移動パターンで、直線移動の距離の分布が、裾野の広いべき分布に従います。稀に生じる長い距離の移動のおかげで、完全にランダムな動きよりも、効率よく広い範囲を探索すること可能であり、実際にミツバチやアホウドリといったさまざまな動物で観察することができます。
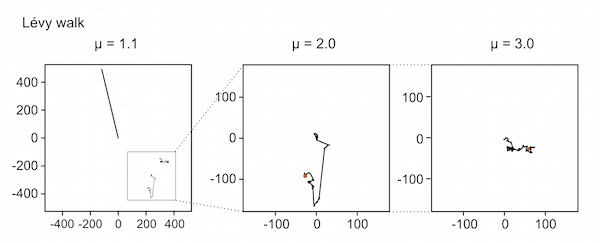
Lévy walkでは、べき分布の傾き(µ)の違いより、上図のようにさまざまな移動パターンを示します。たとえば、µ = 1.1のときには、稀に生じる長い直線移動の長さがとてつもなく長くなるため、動き方はほとんど直進的なものになります。これは、目標物がどこまでも一様に存在しているときには有利な動き方です。一方で、µ = 2.0の時には、長い移動と短い移動がバランスよく生じるため、目標物がモザイク状に分布するときには、効率よく探すことができます。そして、µ = 3.0のときには、ゆっくりその場から離れていくため、目標物が高密度で存在するときに、効率よく多くの目標物と出会うことができます。
これまでのLévy walkの研究は、探索する捕食者が、どれだけ多くの餌を得られるかという、餌探索の状況を想定してきました。一方で、オスがメスを、メスがオスを探索する、配偶者探索においては、オスとメスの両方が探索者であると同時に目標物でもあります。このような相互に探索する時には、オスとメスはどのように動けば効率よくパートナーに出会うことが出来るでしょうか。
相互探索のシミュレーション
そこで、オスとメスがそれぞれの動きのパターンで探索するという、相互探索の状況を考えたシミュレーションモデルを構築しました。動きのパターンには Lévy walk を用いてさまざまなものを用意しました。そして、限られた制限時間内でそれぞれの動きのパターンをしたオスとメスが出会えたかどうかにより、探索効率を計測しました。
最も単純な状況として、1次元空間に1個体のオスとメスがいる状態を考えてシミュレーションを行ったところ、制限時間が短いときには、µの値の小さい拡散的な(直線的に動いた)ペアが最大効率に達し、制限時間が長いときには、µの値の大きい非拡散的な(頻繁に方向転換した)ペアが最大効率を得ました。一方、制限時間が中間的なときには、中間の拡散性を持つペアではなく、拡散的な個体と非拡散的な個体とのペアが最大効率に達しました。
また、2次元空間に複数個体がいる状況に拡張しても、制限時間が中間的な時には、集団内に拡散的な個体と非拡散的な個体がいる場合に、オス、メスともに最大効率を得ることを確認しました。
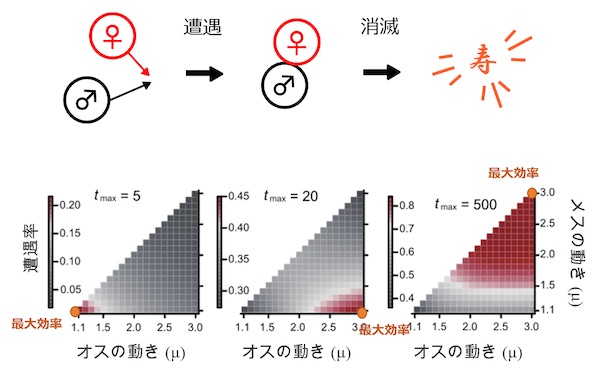
下図: 相互探索シミュレーションの結果。色が赤い部分が、高い遭遇率を示す。制限時間(tmax)が中間のとき、オスとメスで異なる動き方するペアが、遭遇率を最大化できる。シミュレーション内で、オスとメスは動き以外が同じであるため、µの値がオスの方が大きい時のみの結果を示した
オスとメスの出会いが一度きりであるため、探索効率は、どれだけ早く出会えるかと、どれだけ正確に出会えるかの2つによって決まります。制限時間の短いときには、発見速度に集中した方がよいため、オスもメスも発見速度を高めるように拡散的な動きをします。一方、制限時間が長いときには、正確性を求められるため、非拡散的な動きが有利になります。そして、探索時間が中間的なときには、この発見速度と正確性の両方のバランスをとる必要が出てきます。このときには、オスとメスが違う動きをすることによって、バランスよく効率性と正確性を得ることで遭遇効率を上げることができることを発見しました。
どのような例に適用できるか?
本研究により、動きのパターン以外のものがすべて同じであると仮定したとしても、オスとメスが異なるように動くことが最適な探索戦略になり得るという新規の理論を確立することができました。この理論が自然界でどのように機能しているかは、動物の動きのパターンをオスとメスで比較し、その個体にとって探索可能な時間を調べることによって実証していこうと考えています。
たとえばシロアリは、本研究で示した状況と非常に近い探索状況を示す生物です。シロアリは数万匹にも及ぶ集団生活をおくっていますが、一番初めは1匹のオスとメスが出会うところから始まります。このオスとメスは、どこにいるかわからない相手を歩いて探索します。そしてパートナーに出会えた後には、オスがメスを追いかける形でタンデム歩行を行い、巣を作ることのできる場所を探します。この歩行による探索行動について、今後調査を進めていく予定です。配偶者探索の他にも、タンパク質の動きから群ロボット、迷い人捜索に至るまであらゆる1対1の出会いの効率化に応用できると考えています。

また本研究では、餌探索という探索者のみの利益を考えていた先行研究に対して、オスとメスの両方が、探索者であると同時に目標物でもある配偶者探索を調べました。その結果、どちらか一方の効率のみを考えているだけでは、見つけることができなかった、動きの違いが出会いの最適化につながるという現象の発見に至りました。探している相手に効率よく出会いたいならば、相手の利益もまた考える必要があるといえるでしょう。
参考文献
Mizumoto N., Abe S. M. & Dobata S. (2017) Optimizing mating encounters by sexually dimorphic movements. Journal of the Royal Society Interface 14: 20170086.
この記事を書いた人

- 京都大学大学院 農学研究科 博士後期課程在学中。日本学術振興会特別研究員(DC1)。福井県出身。動物の行動のメカニズムとその進化について、主に探索行動と建設行動を対象に、計算機を用いた理論予測と、シロアリを用いた実証研究を組み合わせて研究を行っています。



